Специалисты холдинга «Российские космические системы» (РКС, входит в Госкорпорацию «РОСКОСМОС») освоили экспериментальное производство действующих образцов микроробототехнической шагающей платформы для работы в космосе. Эта разработка станет основой при создании перспективных автономных микроробототехнических устройств для инспекции труднодоступных областей на поверхности и во внутренних отсеках космических аппаратов, а также позиционирования различных модулей космических аппаратов.
Исследования термомеханических компонентов микроробототехнических систем, которые ведутся в РКС с 2008 года, позволили специалистам холдинга совместно с коллегами из Института проблем механики Российской академии наук (ИПмех РАН) создать уникальную технологию изготовления микроробототехнической платформы. Шагающее движение робота происходит за счет программируемой деформации «ножек». При нагреве от подачи напряжения «ножка» разгибается в заранее определенных местах, а при охлаждении сгибается.
При весе всего в 70 мг подвижная платформа может удерживать нагрузку в 20 раз больше, а перемещать – в 5 раз больше собственного веса. При этом скорость его движения составляет около 14 мм/минуту, что очень быстро для изделий этого типа и такого размера. В отличие от создаваемых в мире аналогов, концепция российского микроробота на основе разработанной платформы сможет перемещаться по шершавым, ступенчатым и наклонным поверхностям.
Для передвижения микроробот задействует не менее восьми «ножек» со специальным адгезионным покрытием, позволяющим ему в невесомости «прилипать» к поверхностям. Каждая из «ножек» имеет «ступню», которая может менять угол во время движения. Благодаря этой особенности он может перемещаться по различным поверхностям. В более сложном варианте на «ступне» предполагается создание дополнительного массива из «ножек» меньшего размера.
Руководитель сектора микромеханики РКС Игорь СМИРНОВ: «Вся подвижная платформа – это одна многослойная деталь, технология производства которой похожа на изготовление микросхемы. Это единый технологический процесс без сборочных операций. В основе устройства всего два материала – кремний и полиимид, которые мы получаем от российских поставщиков».
Высокая технологичность производства созданной в РКС платформы позволяет использовать известные методы производства микроэлектронных устройств и существенно упрощает изготовление по сравнению с существующими зарубежными аналогами.
 |
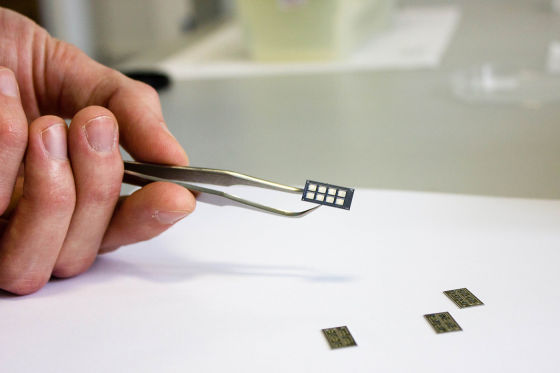
| Элемент микроробототехнической шагающей платформы |
| Источник: http://russianspacesystems.ru/ |
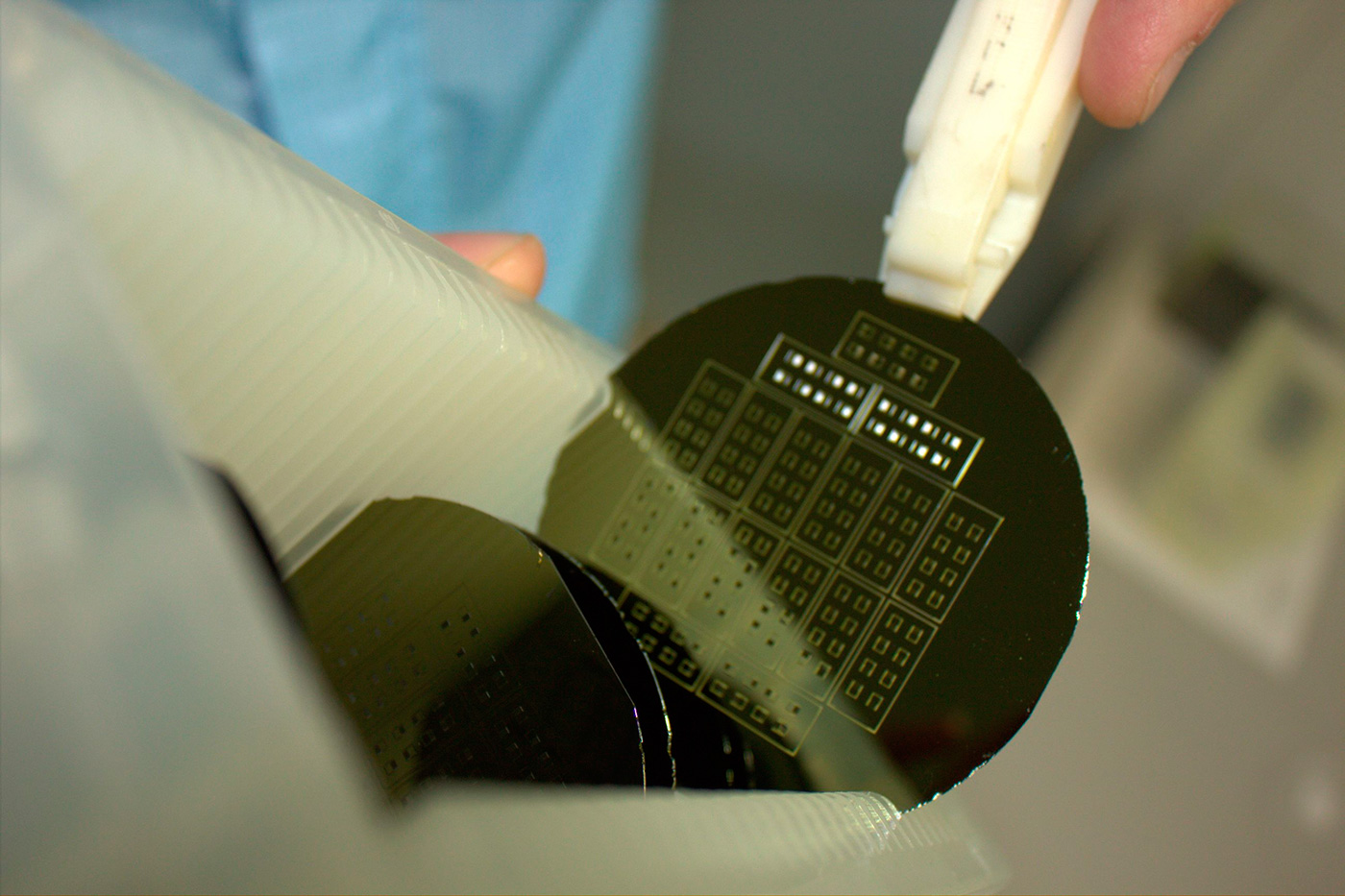
На кремниевой пластине групповым методом с помощью фотолитографии, напыления и анизотропного травления одновременно изготавливаются несколько десятков подвижных платформ микророботов. Такой подход позволяет при серийном производстве путем увеличения размера пластины и использования высокопроизводительного оборудования выпускать подобные устройства сотнями.
Ведущий научный сотрудник сектора микромеханики РКС Дмитрий КОЗЛОВ: «Дальнейшие исследования разработанных робототехнических устройств предполагается вести в направлении создания биоморфных систем. Мы внимательно изучаем движения животных и строение их конечностей (например, семейства гекконовых ящериц) и используем эти данные при моделировании различных аспектов работы устройства, в том числе в невесомости – характер движения «ножек», свойства ворсистого адгезионного покрытия на них, а также модель сил, действующих на платформу».
Прототип микроробота может работать в диапазоне температур от -200 до +200 градусов Цельсия при отсутствии земной атмосферы, а также устойчив к радиации и воздействию атомарного кислорода в открытом космосе.
На следующем этапе работ планируется оснащение микроробототехнической платформы разными типами полезной нагрузки и проведение космического эксперимента на борту Международной космической станции (МКС).